SalamaderRobot.github.io
Salmander Robot
Team
- Aaryan Brahmanand Bhardwaj - abhard27@asu.edu
- Andrew Crouch - AndrewJosephCrouch@gmail.com
- Rohith Kalyan Kavadapu - rkavadap@asu.edu
- Teresa McBryan - McBryan.Teresa@gmail.com
Introduction
Several robots have been created to operate on flat or inclined planes. These robots work well in man made environments. However the world has a myriad of natural environments where these robots would not be able to operate. Some of those include grass, mud, sand, water, or rocky. for our project we selected an environment and a creature that excels in traversing that environment

Research Question
This project is designed to create a robot that can navigate through a granular media using bioinspired characteristics from the salamander while using foldable robotic designs.
Background and Biomechanics
When working towards a a robot that can operate in a granular media the team chose to look at creatures that can move efficiently in granular media already. Salamanders are a creature that can move efficiently over
Kinematics and Dynamics
We modeled the system’s kinematics and dynamics using Python and Pynamics.
Design Optimization
We optimized our design on two different parameters. The angles of the spine from one link to another was optimized with experimetal data. The length of each of the leg links was optimized using scipy.
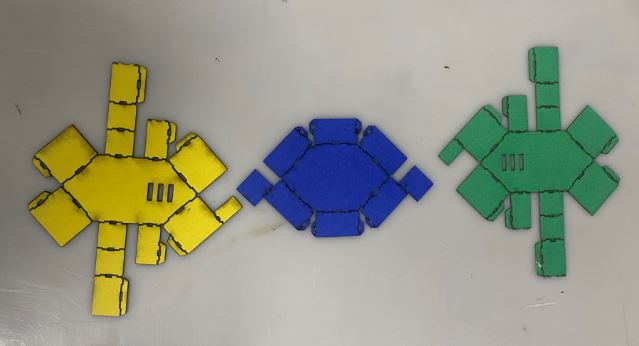
Manufacturing
Our design was maufactured using a 5 layer lamination and three separate body sections. The sections cutout are shown below and the code to create the DXFs are linked.
Presentations
The following links show our presentations throughout the semester as we went from an initial idea to a working prototype.
Cad, Design, and Code
There were several files and supplemental parts of the project that were not explicitly part of the other core components of the project. They have been aggregated here.